5 Trajectory with wind
In this second chapter of the advanced tutorial, we explore how to model the trajectory of the Great Reed Warbler using wind data.
Code
tag <- tag_create(
"18LX",
crop_start = "2017-06-20",
crop_end = "2018-05-02",
quiet = TRUE
) |>
tag_label(quiet = TRUE) |>
tag_set_map(
extent = c(-16, 23, 0, 50),
scale = 4,
known = data.frame(
stap_id = 1,
known_lat = 48.9,
known_lon = 17.05
)
) |>
geopressure_map(quiet = TRUE) |>
twilight_create() |>
twilight_label_read() |>
geolight_map()ℹ Calibrate zenith angle✔ Calibrate zenith angle [16ms]ℹ Compute twilight likelihood maps✔ Compute twilight likelihood maps [2.6s]ℹ Aggregate twilight likelihood maps per stationary periods✔ Aggregate twilight likelihood maps per stationary periods [5ms]Wind can significantly influence a bird’s movement, explaining up to 50% of the displacement! Accounting for wind allows us to estimate the airspeed of each transition rather than groundspeed. As such, the movement model can be defined as the probability of a bird’s airspeed, which is much more constrained and precise. This approach is presented in detail in section 2.2.4 of Nussbaumer et al. (2023).
5.1 Download wind data
Wind data is available at high resolution (1hr, 0.25°, 37 pressure level) on ERA5 hourly data on pressure levels (Copernicus Climate Change Service 2018). This data is easily accessible through the ecmwfr package.
CautionSet Copernicus credentials
If you don’t yet have one, create an ECMWF account at https://www.ecmwf.int/.
Accept the licence agreement on [https://cds.climate.copernicus.eu/datasets/reanalysis-era5-pressure-levels?tab=download#manage-licences] going on the “Licences” tab and select the “Licence to use Copernicus Products”.
Retrieve your API Token on https://cds.climate.copernicus.eu/profile.
Save the token to your local keychain with
ecmwfr(which calls the API Tokenkey):
ecmwfr::wf_set_key("abcd1234-foo-bar-98765431-XXXXXXXXXX")For more information visit the ecmwfr documentation.
As the flights tend to be of short duration, we suggest downloading a file for each flight. This can be done automatically with tag_download_wind(), which uses wf_request_batch() to make all the requests in parallel.
tag_download_wind(
tag,
variable = c("u_component_of_wind", "v_component_of_wind", "temperature")
)You can monitor the requests at [https://cds.climate.copernicus.eu/requests]. The files are downloaded in data/wind/
Note
In addition to the two required wind variables, we also downloaded the temperature data during the flights. This will later allow us to retrieve temperature data at the exact location of the bird during the flight. See tag_download_wind() documentation for more information on the available variables.
Tip
In case you have a lot of tracks for which you need to download wind data and don’t want to block your console, you might consider using an RStudio background job, which can be easily called with the job package:
job::job({
tag_download_wind(tag)
})5.2 Create graph
Similar to the example of the Swainson’s Warbler in the basic tutorial, we first need to create the trellis graph:
graph <- graph_create(tag, quiet = TRUE)5.3 Add wind to graph
We then compute the average windspeed experienced by the bird for each edge of the graph. This process can be quite long as we need to interpolate the position of the bird along its flight on a 4D grid (latitude-longitude-pressure level-time).
We then compute the airspeed based on this windspeed and the known groundspeed. All of these are stored as complex values with the real part representing the E-W component and the imaginary part corresponding to the N-S component.
graph <- graph_add_wind(graph, pressure = tag$pressure, quiet = TRUE)ℹ Pruning the graph: 0/54 transitions (forward and backward).✔ Graph pruned [901ms]5.4 Define movement model
While you can still define the movement model with a parametric function (i.e., gamma or logit), we find it more intuitive to use the mechanical power curve. The power curve expresses the energy required for a bird to fly at a certain airspeed based on aerodynamic theory. See more details in section 2.2.5 of Nussbaumer et al. (2023).
First, we search for morphological information on the Great Reed Warbler using the AVONET database (Tobias et al. 2022).
bird <- bird_create("Acrocephalus arundinaceus")Using the bird created, we can set the movement model by converting the airspeed to power, and power to a probability. This second step is still a parametric equation, which can be manually defined with power2prob.
graph <- graph_set_movement(
graph,
method = "power",
bird = bird,
power2prob = \(power) (1 / power)^3,
low_speed_fix = 15
)
plot_graph_movement(graph)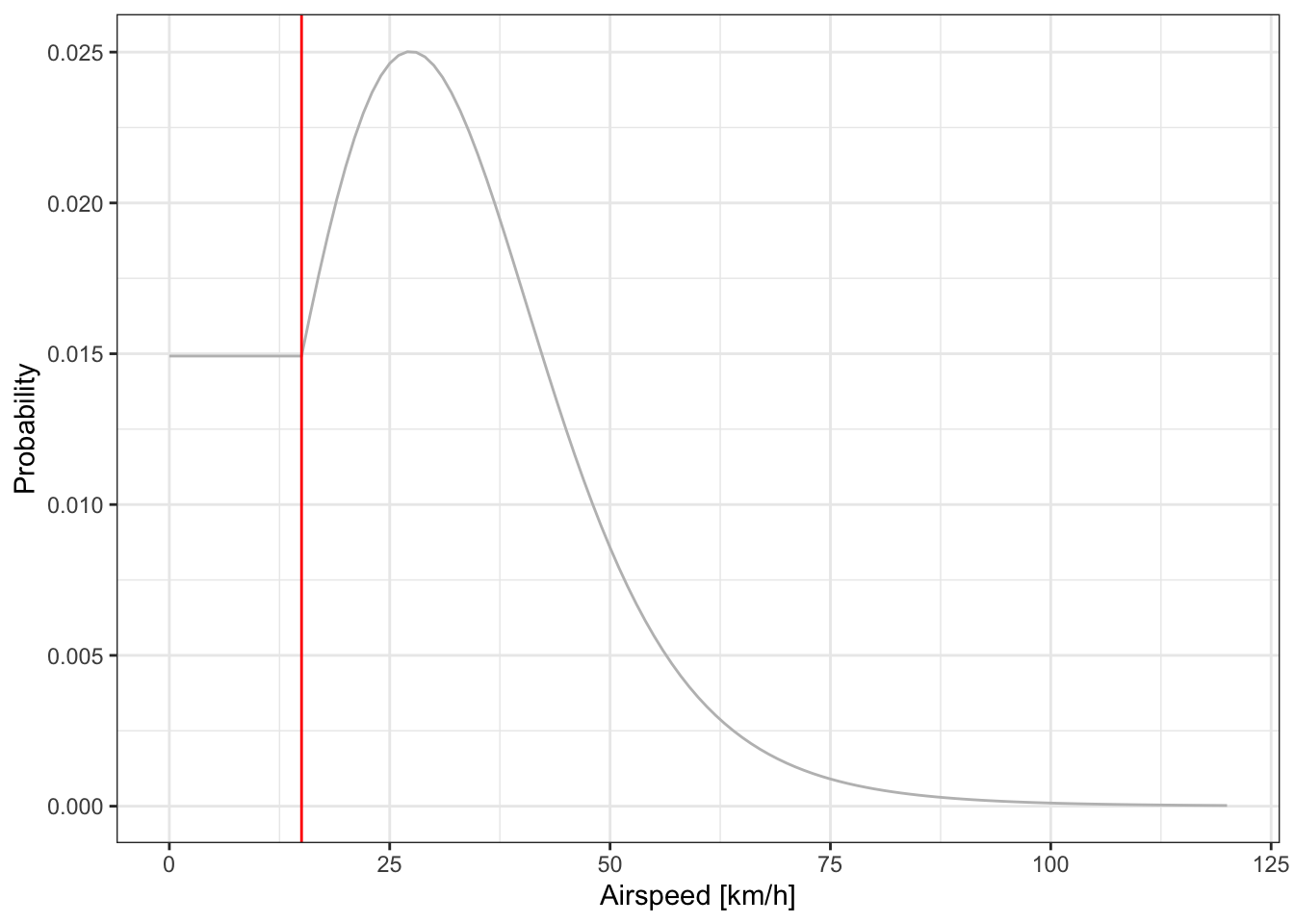
5.5 Products
We can then compute the same three products as for the Swainson’s Warbler:
path_most_likely <- graph_most_likely(graph, quiet = TRUE)
marginal <- graph_marginal(graph, quiet = TRUE)
path_simulation <- graph_simulation(graph, nj = 10, quiet = TRUE)plot(marginal, path = path_most_likely)plot_path(path_simulation, plot_leaflet = FALSE)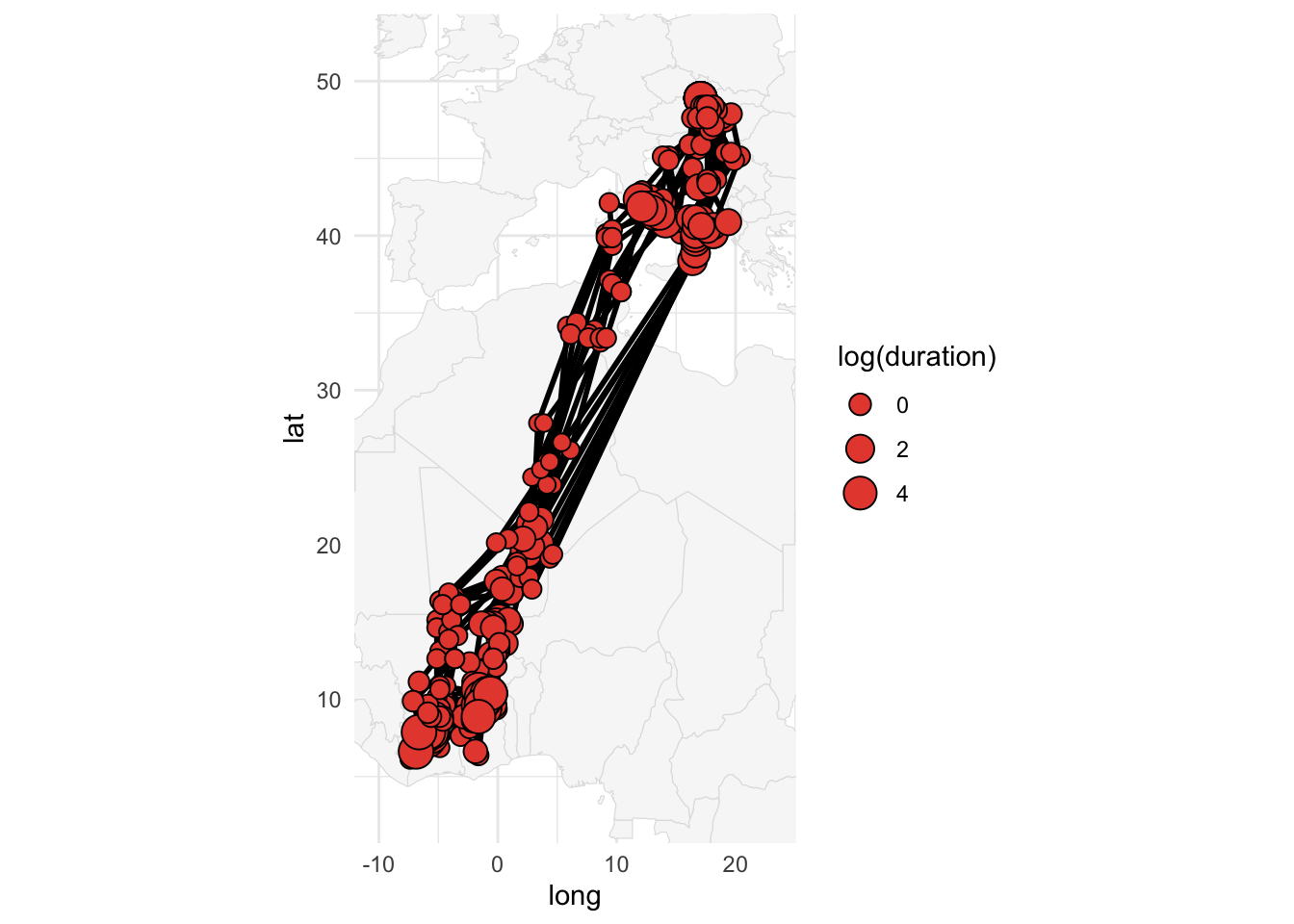
5.5.1 Extract flight information
The pathvariable contains all the information at the scale of the stationary period. However, to get flight information, you need to extract variable of the edge of the graph. path2edge() is the function for that!
| stap_s | stap_t | j | s | t | lat_s | lat_t | lon_s | lon_t | start | end | duration | n | distance | bearing | gs | ws | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 1 | 26405 | 57010 | 48.9 | 47.6 | 17.0 | 16.4 | 2017-08-04 19:47:30 | 2017-08-04 23:17:30 | 3.5 | 1 | 150.5 | 199.7 | -16.1-39.7i | 13.8-13.6i |
| 12 | 2 | 3 | 1 | 57010 | 86621 | 47.6 | 44.9 | 16.4 | 14.4 | 2017-08-05 19:27:30 | 2017-08-06 02:52:30 | 7.4 | 1 | 342.6 | 207.4 | -21.3-41.0i | -5.5-4.6i |
| 22 | 3 | 4 | 1 | 86621 | 118434 | 44.9 | 41.6 | 14.4 | 15.1 | 2017-08-06 19:12:30 | 2017-08-07 03:17:30 | 8.1 | 1 | 366.9 | 170.2 | 7.7-44.7i | -7.8-20.6i |
It’s a good idea to check the distribution of ground speed (gs), winspeed (ws) and airspeed (as) and check for any outliers which might come from error in the labelling. Here you can see the high groundspeed (>100km/h between stap 24 and 25) which is nicely explained by wind, as the corresponding airspeed is perfectly normal (~50km/h)
We can (and should) also check that our movement model is coherent with the distribution of flight speed assumed in the movement model:
plot_graph_movement(graph) +
geom_histogram(
data = data.frame(as = abs(edge_simulation$gs - edge_simulation$ws)),
aes(x = as, y = after_stat(count) / sum(after_stat(count))),
color = "black",
fill = NA,
bins = 100
)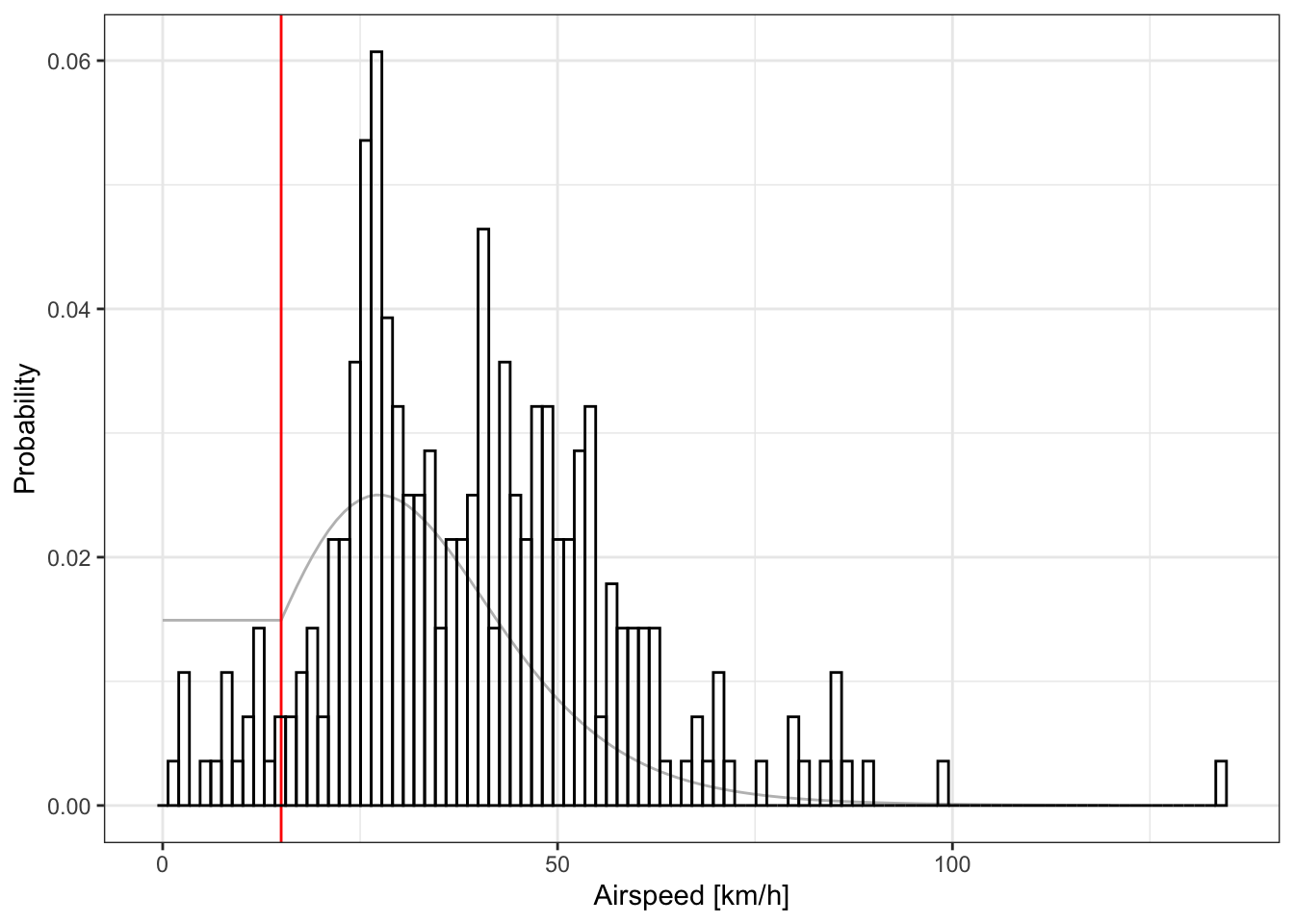
If you find anomalous flight speed, it might be worth checking if this/these flight(s) have been correctly labelled.
5.6 Save
graph can become extremely big for such models and it might not be recommended to save it. Check its size with format(object.size(graph), units = "MB").
save(
tag,
graph,
path_most_likely,
path_simulation,
marginal,
edge_simulation,
edge_most_likely,
file = "./data/interim/18LX.RData"
)
WarningWorkflow note
This manual save() step is only used here to learn the pipeline one step at a time.
For real analyses, especially when processing multiple tags, the recommended approach is to create the interim files with geopressuretemplate().
This workflow is described in detail in GeoPressureTemplate workflow.